Robots in the Wild: Social Science and Humanities at Aarhus University


Challenge
As robots move from controlled environments into real-world settings, they must operate in complex, unpredictable, and human-centred contexts. This creates a fundamental challenge: how can robots adapt to unforeseen situations while remaining safe, reliable, and trustworthy?
Adaptation is essential in dynamic environments. Robots must respond to unexpected changes in their surroundings, system configurations, and human behaviour. Yet this flexibility cannot compromise safety or performance. An adaptive robot must continue to function effectively while maintaining strict safety guarantees.
Take a closer look at our reports
Report I – Robot Autonomy and Conferences
Robot autonomy is largely imagined, narrated, and oversold in public and professional discourse. Conferences and demos often present robots as far more autonomous, capable, and adaptive than they are in practice, shaping unrealistic expectations among stakeholders. These imaginaries obscure the extensive human, organisational, and infrastructural work required for robots to successfully engage in collaboration with humans. As a result, autonomy is treated more as a vision and promise than as an operational reality, creating a gap between perception and real-world deployment. It is precisely this gap that the fieldwork presented and analyzed in the following reports attempts to illuminate.
Report II – Robots in Public Space
In public spaces, robot autonomy is fragile and frequently disrupted. Unstructured human behaviour, social norms, unpredictability, and ambiguity continuously challenge robotic systems, forcing frequent human intervention. The autonomous programming of robots does not translate well to dynamic public settings, where the humans interacting with the robots aren’t aware of its rigid settings and technical limitations. This leads to breakdowns in trust and functionality, showing that public spaces expose the limits of autonomy when social complexity cannot be
controlled or standardised.
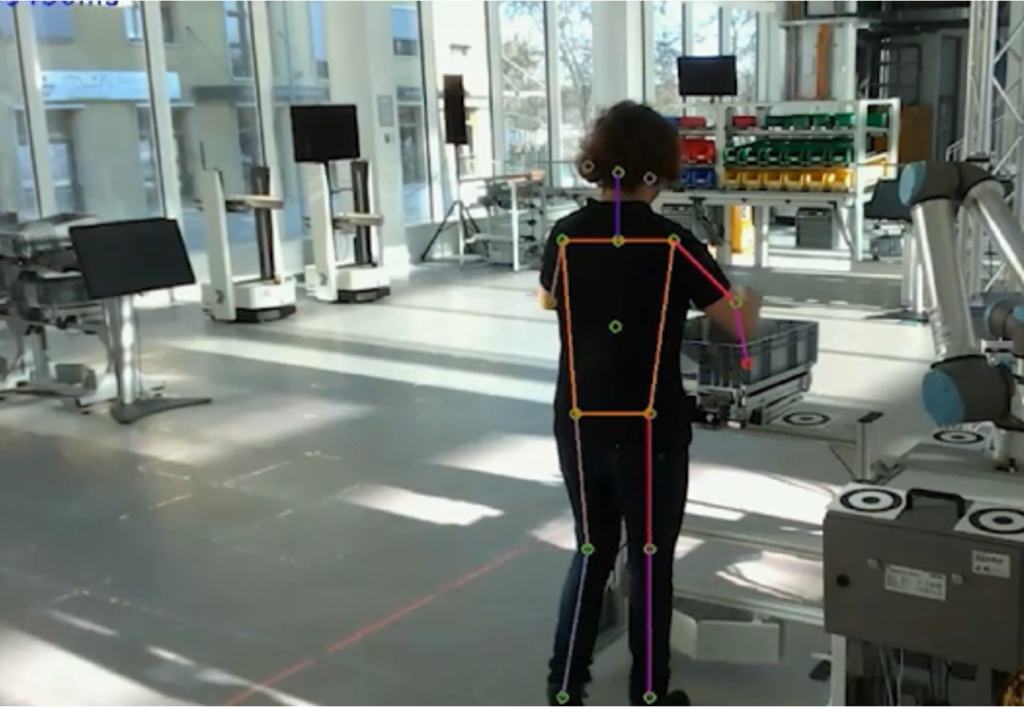
Report III – Robots in Organisations (Controlled Environments)
In organisational settings, robot autonomy is actively negotiated with and by humans in the collaboration. Routines, training, safety procedures, workarounds, and distributed responsibility replace full autonomy, enabling robots to function reliably despite limited adaptive capabilities.
Safety and trust are achieved not through autonomous decision-making, but through the collaboration between humans, procedures, and technology. Organisational environments can stabilise robots, but only at the cost of continuous human involvement and oversight. The robot’s autonomy becomes a delusion, since it only fully exists in the carefully constructed social context, made by human workers.
Report IV – Robots in Dynamic Environments
In highly dynamic environments such as agriculture, and maritime contexts, the robot is faced with a greater degree of unpredictability and instability. Environmental variability, delayed feedback, high cost of failure, and dynamic conditions make autonomy extremely difficult to realise. Important factors such as formalized standards and organizational routines, are necessary for the safe operation of the robot. Robots must operate within strict safety envelopes and in many cases remain dependent on human supervision. This highlights a fundamental boundary for autonomous adaptation, where the unpredictability of nature, the current certification and safety standards struggle to cope with real-world uncertainty. Because of these issues, the humans become an intricate part of the robot’s interaction with the environment.
Report V – Autonomy in Robots Revisited
Autonomy in Robots Revisited synthesises the findings from the Robots in the Wild series, showing that robot autonomy is not achieved by technology alone. Instead, it emerges through the interaction between robots, people and real-world environments. The report explores how safety, trust, uncertainty and human practices shape the future of trustworthy adaptive robotics.
Impact
These reports reinforce the importance of designing adaptive robots that are not only technically capable, but also socially trustworthy. By integrating SSH perspectives, they highlight the need for safety, transparency, and human-centred design in real-world robotic deployment. Their impact lies in shaping how researchers, industry, and policymakers approach responsible robotic self-adaptation.
Future Outlook
Looking ahead, these insights can inform future standards, methodologies, and governance frameworks for adaptive robotics. As robots become more autonomous and widespread, combining technical innovation with social responsibility will be essential to ensure their safe and accepted integration into society.